作者简介:孙剑锋,男,河北石家庄人,中国人民大学法学院暨刑事法律科学研究中心博士研究生,研究方向:刑法学。
摘要:人机共驾是指以自动驾驶系统操作机动车为主、驾驶者随时接管车辆为辅的一种新型驾驶模式。在面对紧急情况,即保护驾驶者安全与公共安全相抵牾时,驾驶者与自动驾驶系统如何抉择,便产生了“电车难题”。自动驾驶系统中的最小风险管理义务是驾驶者无法及时处理紧急情况时,临时接管机动车的算法,基于人工智能的治理原则,以保护公共安全为优位;而驾驶者面对紧急情况时基于本能反应,选择保护自身安全,牺牲公共安全。对于二者的冲突,借助数据分析探索调和路径,通过对影响交通事故的动态与静态因素的分析,在冲突造成损害结果后明晰归责主体。
关键词:人机共驾;“电车难题”;自动驾驶系统;最小风险管理义务;紧急避险
一、问题之提出:人机共驾下的“电车难题”
“电车难题”一直是学界所探讨的话题。通常所讨论的“电车难题”(the “trolley problem”),是由哲学家菲利帕·富特(Philippa Foot)在20世纪60年代提出的一个假想案例:一辆失控的电车倘若在既定的轨道上继续行驶,会撞死轨道上的五个人,而假设此时司机将电车转向另一条轨道,则只会撞死该轨道上的一个人,已知此六个人绝对平等,不存在任何方面的差异,此时该如何选择。
自动驾驶系统本有希望通过算法的运行,使机动车在面对两难困境下瞬间作出最优解,然而囿于当前的技术,面对“电车难题”,自动驾驶系统作出的反应依然会受到法律以及伦理方面的诘难。工信部发布的《汽车驾驶自动化分级》将汽车自动驾驶系统层级大致分为六种,实际上,受当前技术与规范的限制,自动驾驶系统的最高限度为3级,即在大多数情况下主要由自动驾驶系统负责驾驶机动车,但依然离不开驾驶者的监督。换言之,驾驶者依然需要在自动驾驶系统驾驶期间保持高度警惕,以随时应对突发情况。本文所探讨的便是此种人机共驾模式。
从本质出发,“电车难题”实际上是紧急情况下不同价值判断之间的冲突。在人机共驾模式下,对结果发生起决定作用的是驾驶者与自动驾驶系统。因此,当面临紧急情况且无法同时保全驾驶者的生命与公共安全时,依然关涉到上述两主体内部及其相互之间的选择与差异。故而人机共驾模式下的“电车难题”愈发复杂,概括来讲,囊括三种冲突:自动驾驶系统内部所面临的价值冲突、驾驶者自救行为在适用规范上的冲突以及二者之间的冲突。
二、问题之内核:人机共驾下冲突的若干类型
人机共驾模式下的“电车难题”的内核是自动驾驶系统的最小风险管理义务同驾驶者紧急避险之间不同的冲突。本部分以此为线索,详细分析人机共驾模式中冲突的具体情形。
(一)履行最小风险管理义务面临价值冲突
由于我国目前在规范层面仅规定了自动驾驶系统在道路上测试与示范应用时应当注意的事项, 同时鉴于德国在自动驾驶的事故归责领域作出了较多有益的贡献,因此本文主要借鉴德国《自动网联驾驶战略》(Strategie Automatisiertes und Vernetztes Fahren)及《自动驾驶法》的相关内容,总结得出,最小风险管理义务是指当面临紧急状态,且驾驶者无法反应过来时,需要由自动驾驶系统替驾驶者作出选择,以保护交通安全的义务。
事实上,最小风险管理义务存在单独适用的情形。在此情形中,从发生交通事故开始,直到紧急情况结束后,驾驶者始终未能作出反应,而是完全由自动驾驶系统按最小风险管理义务作出判断。此时冲突仅存在于最小风险管理义务内部,即当面临紧急情况且必须在保护驾驶者安全和公共安全之间作出选择时,自动驾驶系统应当如何抉择。
在人机共驾中,要求驾驶者一直保持警惕的注意义务,不仅违反了人的生理要求,而且与技术本身的设定初衷相悖。“自动化偏见”(automation bias)理论认为,由于自动化决策具备高效率及准确性,导致很多人误认为自动系统是更值得信赖的。自动驾驶系统依托自身的运算模型,通过与道路摄像头等信息的交互,以及对车辆端口的实时监测,实现对交通风险的提前预知与防范。驾驶者即便被告知要保持注意义务,也难免会基于对自动驾驶系统的“偏见”而精神懈怠。同时,此处所探讨的并非“算法偏见”(algorithmic bias):“违反公认的规范、法律或道德原则而对数据进行有偏处理”,其逻辑前提是系统本身存在意识。然而本文所探讨的自动驾驶系统,其运行程序依然无法跳脱出设计者所制定的程序框架。因此,在归责时也会顺理成章地指向自动驾驶系统的设计者、厂商等责任主体。
根据自动驾驶系统的设计伦理,自动驾驶系统的底层逻辑是以保护人的生命为第一要义的。然而,对于此处所保护的“人”的含义,存在两个命题:第一,在保护驾驶者生命的前提下,最大限度保护他人的生命;第二,在同等意义上保护所有人。此两种理解得出的结果截然相反,并且似乎均无法跳脱出“电车难题”所筑起的伦理篱笆。其一,倘若依照第一个命题继续延展,自动驾驶系统在面对冲突时会选择牺牲公共安全去保护驾驶者的生命。出于产品销售角度考虑,这样的程序应当是商家的首选, 对于消费者而言更是如此。但如此一来,基于智能化技术自身精密的运算能力及反应速度,为努力保护驾驶者的生命安全,自动驾驶系统可以更加精准地牺牲公共安全,这便会面临伦理学上的诘责,且容易造成公众的恐慌。其二,假设依据第二个理解进一步推演,从功利主义角度出发,当保护驾驶者安全与保护公共安全发生冲突时,自动驾驶系统会根据预设的系统保护公共安全。但从商业角度出发,此种理念会影响自动驾驶系统的销售,毕竟消费者是基于信赖“自动驾驶系统可以保护自身生命”而购买产品的,而非其他原因。
(二)驾驶者自救行为适用紧急避险的冲突
本情形是指当面临紧急情况时,驾驶者在第一时间控制机动车,并不存在自动驾驶系统履行最小风险管理义务的空间。基于求生的意志,驾驶者的选择必然是为保护自身安全这一目的所服务的。此时的冲突在于,驾驶者的自救行为能否得到法规范的容许,即驾驶者“舍他人为己”的行为能否得到规范的认可。
从形式上来看,驾驶者的自救行为符合紧急避险的避险意图、避险时间及相当性条件。据此,此种情形下的冲突进一步具象为此时驾驶者的自救行为能否符合紧急避险的其他条件:
一是驾驶者的行为构成紧急避险的因从何来。区别于自然力量、动物侵袭、非法侵害行为及人的生理病理原因等紧急避险的常见起因,对于本文所探讨的紧急情况,是否存在紧急避险的起因存在疑问。当事故发生时,驾驶者第一时间接管机动车,由于驾驶者之前并未操控机动车,因此其本身的行为并不是造成紧急情况的原因,而是由自动驾驶系统或者机动车之外的其他因素所导致的。
二是驾驶者的行为是否成立避险过当。对于牺牲公共安全保全自己生命的行为的性质,学界存在争议。有观点认为,由于生命无法衡量,因此该行为不能认定为违法阻却事由,而是应认定为阻却责任的紧急避险。也有观点主张,此种行为无论如何也无法成立责任阻却事由,而是应成立违法阻却事由。究其原因,责任阻却事由的根据在于期待可能性,而期待可能性需要结合当时的实际情况方可判断。本文支持此种观点,对此将在下文详细展开。
(三)履行最小风险管理义务与驾驶者自救行为的冲突
在自动驾驶系统对紧急情况履行最小风险管理义务之后,紧急情况得到解决之前,驾驶者反应过来并接管机动车。具体情形如图1。
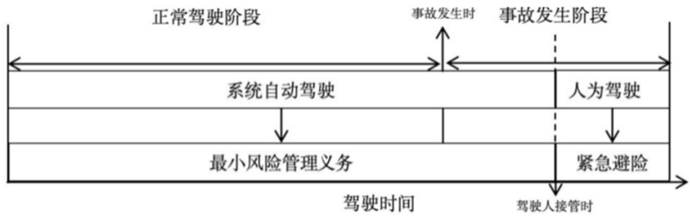
图1 最小风险管理义务与紧急避险冲突情形示例
面对可能存在的疑问:当自动驾驶系统履行最小风险管理义务之后,驾驶者为何还可以掌控方向盘实施自救行为?本文认为,原因有二:一是基于归责方面的考虑。最小风险管理义务设立的初衷是在驾驶者无法反应过来时,最大限度地保障“人”的安全,否则便会受到来自规范及道德等方面的苛责。然而,倘若此时驾驶者掌控机动车作出选择,并造成相应的损害结果,从自动驾驶系统的角度出发,便会摆脱归责方面的困扰。二是有利于尊重与保护驾驶者自救的权利。当驾驶者在面临困境时,理应允许其保护自身的安全,而非任由自动驾驶系统的选择而致使驾驶者陷入绝望的境地。据此,如图1,当驾驶者在此情形中接管机动车后,可能会出现两种情况:
其一,自动驾驶系统所作出的选择同驾驶者的判断一致。此时驾驶者在接管机动车后,依然会遵循自动驾驶系统的选择,并不会作出改变。本文认为,此种情形并不存在冲突,对于造成损害结果的,根据客观归责理论即可解决责任分配问题。
其二,自动驾驶系统所作出的选择同驾驶者的判断相左,且造成了较为严重的损害后果。此种情形亦是本文所讨论的核心问题。而造成此种情形的原因,主要便是自动驾驶系统在履行最小风险管理义务后,在保护公共安全与驾驶者安全产生冲突时,选择保护前者。但驾驶者在接管机动车后,基于保护自身安全的考虑,选择牺牲公共安全保护自己。此时的冲突不仅囊括自动驾驶系统的判断立场,同时还关涉驾驶者的价值判断。
由此,不难看出,本部分冲突的情形实则是建立在对上述两种冲突分析的基础上,依照逻辑循序渐进得来的。换言之,倘若人机共驾下的冲突是数学中的“二元一次方程”,则上述两种冲突的立场便是其中的未知数,只有确定未知数的条件,才可以进一步推导方程式。
综上,除两主体内部及相互之间的冲突本身之外,本文所讨论的冲突还关涉对不同情形下的结果予以归责的问题。其一,当只有自动驾驶系统履行最小风险管理义务与驾驶者的自救行为单独发挥作用时,对于造成的损害结果的责任,是否应当由各自行为的主体承担。其二,当自动驾驶系统履行最小风险管理义务与驾驶者的自救行为对结果的发生先后发挥作用时,对造成的损害结果的责任,是否应当由双方主体承担,以及分别应当在多大程度上承担责任,均是下文在对冲突进行调和之后需要论证的问题。
三、履行最小风险管理义务之调和与归责
基于自动驾驶系统的设计初衷,即保护交通安全的功能, 最小风险管理义务是自动驾驶系统必不可少的。据此,本部分旨在确立与调和最小风险管理义务价值立场的基础上,论证其可以适用的出罪理论及归责路径。
(一)最小风险管理义务以公共安全为优位
从技术层面来讲,最小风险管理义务的底层逻辑是在道路使用者之间公平分配危险,在面临紧急情况时,基于驾驶者自身所处的场域及情形,以保护公共安全为首要原则,在保持以上基础的同时,力求保护驾驶者的安全。然而可以预见到的是,此项原则的确立,必定会因为对生命进行衡量,而受到关于功利主义的批判。
目前,各国政府及企业均立足自身的实践和价值立场,制定各项人工智能治理原则,同时对于不同治理原则的优先度存在差别考量。以我国为例,我国对于人工智能的治理原则主张伦理先行,同时要求兼具安全可控、公平普惠、开放包容以及和平利用等原则,体现了我国事先对人工智能的风险管控。当然,出于价值论方面的考虑,各原则在具体情形中发挥的主要作用也各有不同。以上原则可称为“软法”,即虽然缺乏强制力和执行力,但可以在社会运转过程中发挥其实效的规范。据此,本文根据最小风险管理义务的技术特点及紧急情况的现实因素,拟从安全原则、公平原则和伦理原则出发,分析最小风险管理义务应当坚持公共安全优位的原因。
首先是安全原则。安全原则要求人工智能的设定以保护人类的安全为前提,同时在此基础上,还需平衡利益与风险,在整体上实现社会的安全性。从技术进步的角度出发,自动驾驶系统不仅要提升驾驶者的安全系数,也需要肩负起提升整个社会交通安全系数的使命。然而,最小风险管理义务倾向于保护公共安全的原因在于,面对紧急情况时,驾驶者坐于车内,在安全带及安全气囊等设备的保护下,驾驶者保持安全或生还的概率较没有任何保护措施的公共人员而言要高。
其次是公平原则。公平原则的实质在于消除歧视,即禁止在设定程序时对不同群体产生主观上的歧视。该原则与伦理学中的社会平衡原则相类似,后者要求创设“(获得发展的)机会平等”。尽管二者存在差异,但以此理念似乎可以用来解释此处平等原则中“不歧视”的含义,即当面临紧急情况时,与此所关涉的所有人都应当具有使自己生命得到保障的权利。出于求生欲,驾驶者在面临紧急情况时会本能地选择保护自己的生命,而此时若假设最小风险管理义务依然选择保护驾驶者的安全,那么最终的结论必定是唯一的,即公共安全将一直作为被牺牲的对象,这显然是与公平原则理念不相符合的。据此,最小风险管理义务理应保护公共安全,为公众保留“机会”。
最后是伦理原则。由于伦理的概念较为模糊,因此与其只针对特定问题探讨,不如据此得出具有共识性的判断意识及方法。黑格尔曾指出:“(伦理是)活的善,这活的善在自我意识中具有它的知识和意志,通过自我意识的行动而达到它的现实性。” 然而事实上,“善”的概念(也称为“非工具价值的东西” )与“公平”是存在冲突的, 尤其是在生命衡量的问题上,如何维护“公平”,始终存在争议。最为典型的便是功利主义的观点,认为以牺牲少数人生命以保护多数人生命的行为,可以作出罪处理。但如此的超个人主义做法,即“公共利益先于个人利益的理念” ,必然会导致多数人对少数人的暴政。据此,本文的出发点并非基于功利主义,而是强调将“主体价值判断的权利和责任统一归还为实际的主体” ,从责任以及交通秩序的角度加以考量。其一,从责任出发,自动驾驶系统不仅要对驾驶者的生命承担责任,同时也要对公共安全承担责任。而后者对于厂商而言,无疑是更为沉重的负担,因此也会更加促使设计者不断更新技术,以减轻自身可能承受的法律负担。其二,对交通秩序而言,倘若将最小风险管理义务以保护驾驶者生命为优先的消息广而告之,会导致公众对自身交通安全的恐慌,毕竟无人会不担心自己成为被牺牲的对象。
(二)履行最小风险管理义务的行为不能适用紧急避险
有观点认为,人机共驾模式下“电车难题”式的碰撞选择可以适用紧急避险的原理。然而本文认为,此种观点存在值得商榷之处,履行最小风险管理义务的行为与紧急避险之间存在着本质区别。
其一,履行最小风险管理义务的主体与紧急避险的主体不同。最小风险管理义务尽管为自动驾驶系统事先设定好的程序,然而其依然是由设计者在根据法律规范、公司章程以及自身的价值判断等约束的基础上制定而成的,换言之,此种情形下对“电车难题”的判断,依然是“人”(设计者)自身决断的映射。尽管设计者同样是受法律约束的自然人,但由于其归根结底并不能完全替代面对紧急情况时的驾驶者,因此站在不同立场时作出的判断也可能存在差异。
其二,最小风险管理义务的判断逻辑同避险意识的内容也可能存在分歧。避险意识考量的是国家、公共利益、本人或者他人等多个主体之间的利益。由于主体的差异,倘若将紧急避险适用于履行最小风险管理义务的行为,那么设计者同驾驶者得出的选择便会出现分歧。第一,对于设计者,假设以保护驾驶者的生命为前提,适用的便是“为保护他人利益”,牺牲公共安全。第二,对于驾驶者而言,由于自救的潜意识,驾驶者一般均会选择保全自己的性命,因此适用的便是“为保护本人利益”,牺牲公共利益。不难看出,两个选项之间存在明显分歧,且可能会导致对驾驶者合法利益的过度侵犯。倘若自动驾驶系统预先根据保护公共安全作出了判断,由于此时履行最小风险管理义务的行为同样适用紧急避险,此时驾驶者便无法对自动驾驶系统的判断再次实施紧急避险。原因在于,紧急避险的起因之一是非法侵害,而此时履行最小风险管理义务的行为得到了规范上的肯定,因此驾驶者的自救行为反而无法可依,这明显是不合适的。
(三)履行最小风险管理义务的行为不能适用容许的风险理论
有学者认为,倘若损害结果是由于自动驾驶系统之外的偶然因素所造成的,此时便无法苛责自动驾驶系统的设计者未尽到注意义务,也不能将造成的损害结果归责于设计者。换言之,该说主张通过容许的风险理论降低对设计者注意义务的限制,当自动驾驶系统面对超出其自身设定程序之外的偶然情形时,便不能苛责设计者承担超出其注意义务的责任。本文部分赞同该说的观点,由自动驾驶系统造成损害结果的归责主体的确应当是设计者。但是本文认为,该观点还存在值得商榷之处。
其一,偶然因素及设计者注意义务的外延难以界定。第一,偶然因素的标准难以确定。鉴于道路交通的复杂情形,界定哪些因素是偶然因素是难以实现的。行之有效的方法是,制定出一个原则性的规范,并在今后的技术发展革新中不断加以完善。然而此种方式存在显著的弊端:一是原则性的规范较为模糊,并不适合作为判断具体情形的标准;二是技术的发展具备不确定性,未来会行至何方,终究难以预估。因此,将来所要形成的标准也游离于当前的现实之外。第二,设计者注意义务的外延难以框定。对于注意义务的标准人,我国的通说认为应以行为人和一般人的标准相统一(也称折中说), 也有学者主张应当以行为人本人的标准为唯一判断标准(一元行为人标准说)。本文支持后者。据此,即便存在程序设定的基准,且并非一切可预见的风险都足以证成预见义务,但每个设计者的能力不同,难免会存在程序设定上的差别。此时如何锚定具体设计者的注意义务也是摆在此说面前的难题。
其二,适用容许的风险理论会导致自动驾驶技术进步的滞缓。对于新兴技术,尤其是对交通便利及安全大有裨益的技术革新,应当保持包容的态度。这本无可厚非,根据“科技主义优先论”,国家及社会的发展依赖于科技进步,对科技设限过多(如“刑法规制优先论”),不利于科学技术的蓬勃发展。然而,倘若沿用容许的风险理论,可能会将本属于自动驾驶系统设计者的责任,转移给复杂的交通运输情形,长此以往反而不利于自动驾驶系统的进步。换言之,“科技主义优先论”的出发点是保持与科技进步带来的风险相适中的刑罚,从而在合法合规的路径上高速发展。但假若一味对科技进步采用宽容甚至纵容的态度,使得技术拥有者获得的利益与承担的风险之间明显失衡时,不仅无法保障科技平稳进步,反而适得其反,使得“科技主义优先”变为了“科技进步阻却”。
(四)结论
在最小风险管理义务以公共安全为优位的路径下,对于履行最小风险管理义务造成驾驶者重伤或死亡结果的责任,应当归结为自动驾驶系统的厂商及设计者。其一,自动驾驶系统的设计者作为直接责任人员,需要根据行为当时的具体情形,分析其是否缺乏期待可能性。倘若还存在其他可以保全驾驶者安全的方式,但设计者忽略的,因而导致驾驶者伤亡的,设计者需承担过失致人死亡的责任。其二,对于单位犯罪,自动驾驶系统厂商除根据具体情况,在承担具体罪名罚金的同时,也需对驾驶者或其家人承担相应的民事损害赔偿。
四、驾驶者自救行为之分析与归责
面对人机共驾下的“电车难题”时,由于驾驶者求生的意志与避险意识较为类似,若寻求法规范的认可,通过紧急避险加以分析与归责的路径无疑是最为合适的。
(一)驾驶者自救行为适用紧急避险之前提
从价值层面出发,驾驶者的自救行为似乎情有可原。但事实上,除客观上造成了损害公共安全的结果之外,驾驶者在主观上也具备间接故意或过失。
其一,驾驶者在部分情形中依然存在成立间接故意的可能。在部分情形中,当驾驶者面对紧急情况甚至不知道自己所转向的方向是否存在危害公共安全的危险时,此时何谈具备故意的认识因素。但也需要承认,在部分情况中驾驶者的确具备认识因素,虽然不会希望损害公共安全,但依然会对此结果采取放任的心态。
其二,驾驶者也仍旧存在成立交通肇事罪的可能,只是对其判定的要求要相应降低。当3级自动驾驶系统面对紧急情况发出接管请求时,囿于技术层面的限制,驾驶者仍需保持注意义务。因此对于未能及时接管或未能及时避免,因而造成损害的,驾驶者存在过失,构成交通肇事罪。但同时,自动驾驶系统的出现,势必会在一定程度上改变先前以驾驶者作为判断中心的方式,影响以往对驾驶者行为是否违规的判断。换言之,在面对道路上的突发情况时,由于自动驾驶系统对车辆的控制,使得驾驶者的观察、反应及判断能力降低,驾驶者的注意义务当然地会受到限缩。
据此,驾驶者的主观因素依然存在入罪的可能。同时,在驾驶者选择背后所蕴含着的基于求生而选择牺牲公共安全的主观心态,或许可以作为避险意识,成为适用紧急避险的契机。因此在本文所探讨的情形中,紧急避险便是唯一可担驾驶者自救行为出罪“重任”的路径。
(二)驾驶者自救行为适用紧急避险之确立
对于驾驶者的自救行为,尤其是对于本情形所讨论的牺牲他人生命的行为能否适用紧急避险的前提,便是需要分析其行为是否符合紧急避险的理论根基。
首先,社会相当性无法成为理论根基。社会相当性说以有关违法性本质的规范违反说为前提,认为只要属于历史性形成的社会秩序框架之内的行为,便可以正当化。然而,社会相当性说并没有明确实质性的判断标准。其一,社会相当性说对于何为“日常性、通常性”,并没有明确具体的判断标准,无法解决具有争议的问题。其二,如果将社会大众所能接受也作为其行为是否阻却违法的标准,则实际上将此判断标准变成了社会大众的标准。然而对于本文讨论的情形,社会大众基于自身的利益,很难认可自救行为的正当性。
其次,功利主义也不能成为理论根据。《宪法》第33条第2款规定:“中华人民共和国公民在法律面前一律平等。”从规范上而言,基于人人平等的原则,任何牺牲他人生命以保护自己的行为都无法得到规范上的肯定评价。纯粹从功利角度考虑,不仅会导致个人利益被无故剥夺,同时还会引起社会利益的无限膨胀。据此,功利主义不仅不能适用于最小风险管理义务,同样也不适用于驾驶者的自救行为。
最后,自由平等原则和社会团结原则较为合理。前者基于法律面前人人平等原则,主张人的生命是不可衡量的,坚决反对为多数人生命而牺牲少数人生命的行为,后者强调“公民对于社会共同体的其他成员负有一定的扶助和照顾的责任”。本文赞成此种观念,同时认为,本文所讨论的驾驶者的自救行为符合此两种理念。其一,驾驶者的决定来源于驾驶者的求生意愿,其既未希望用多数人的生命来挽救自己的生命,也并未因要保护多数人生命而放弃自己的生命。其二,对于驾驶者因紧急情况而产生的险情,社会共同体的成员具有一定的照顾责任,符合社会团结义务的构想。当然,社会共同体的成员承担的责任并非无限制的。
(三)驾驶者自救行为适用紧急避险之证成
尽管从前提条件和理论根基上已经说明了驾驶者的自救行为符合适用紧急避险的要求,但倘若要说明其行为足以成立紧急避险,还需从行为是否符合避险起因及限度方面展开讨论。
其一,从避险起因来看,驾驶者所面临的危险来自于他人违反交规的行为及突发情况。第一,他人违反交规的行为。包括但不限于行人突然从非斑马线的位置横跨马路、其他车辆发生碰撞事故后对驾驶者所处车道的威胁等情形。此时自动驾驶系统无法根据提前量预先作出判断,需要由驾驶者或自动驾驶系统瞬时作出反应,而此时面临风险的大小又会受相对距离、相对速度的绝对值和方向等动态风险场的场强因素影响。第二,突发情况。尽管自动驾驶系统会对车辆自身状态进行实时监控,如对车辆轮胎正常功能是否运转的在线评估与预警等。然而,对于因恶劣气候、道路特定状况引起的突发状况,自动驾驶系统依然难以有效躲避。对于前者,主要指雨雪天气路面湿滑导致不可控的风险增加;对于后者,包括诸如地面存在的玻璃、图钉等影响安全行驶的因素,由此导致的车辆侧翻或脱离自动驾驶系统掌控的情形。以上均属于驾驶者所面临的危险,属于避险起因。
其二,从避险限度出发,驾驶者的行为造成了不应有的损害,成立避险过当。利益衡量是所有紧急权的基础,而基于生命不可衡量这一理念,同样不能认为驾驶者的生命高于多数人的生命,否则这种以生命换生命的行为便是违法的。此时需要关注的,便是双方所代表的利益究竟哪方的“份量”更足。道路交通中不仅存在各方的生命安全法益,同时也存在信赖原则这一与当今交通秩序紧密相关的理念,而此时倘若认定驾驶者的行为符合信赖原则,无疑会对当前正常的交通秩序产生难以逆转的影响。基于此,利益衡量的天平发生了“倾斜”,驾驶者的行为也由此造成了不应有的损害,构成避险过当。
(四)结论
在本部分所探讨的问题中,驾驶者自救行为的归责路径,分成以下两类:一是对驾驶者在条件范围内作出的反应。此时驾驶者本能的求生意志(由皮质认知回路)所产生的防御性生存系统,会在驾驶者产生意识的第一瞬间操控身体作出有益于保全自身生命的做法,完全是其作为生命个体试图挽救自身生存的下意识举动。基于规范责任论的立场,应当客观评价行为人面临的具体情形。此时驾驶者不具备期待可能性,排除刑事责任。二是驾驶者晚于条件范围内作出的反应。此时驾驶者经过权衡后,不得不选择保护自身安全,对此可依据期待可能性酌情减轻其刑事责任。可见,相较于第一种情形,驾驶者更多是基于本能意识的判断而言,第二种情形中驾驶者对于自动驾驶系统履行最小风险义务所导致的结果,增添了更多自己的价值判断。而根据责任主义,行为人理当对基于自由意志的行为承担责任, 因此驾驶者需要承担相应的刑事责任。
五、驾驶者与自动驾驶系统冲突之调和与归责
在确定好未知数后,便可以成功地解开人机共驾冲突这一“二元一次方程”。上文两主体的调和及归责路径,均关涉二者有无履行注意义务以及有无期待可能性。据此,本部分从具体因素的视角介入,进一步明晰双方发生冲突后的调和与归责路径。
(一)冲突发生后的情形及理论归责路径的局限性
根据最小风险管理义务的运行逻辑,其当且仅当驾驶者在面对紧急情况的第一时间并未作出判断时,才会发挥作用。因此,双方的冲突存在时间上的先后性。据此,以冲突行为最后所造成的主体预期结果为依据,可以将此时冲突造成的结果细化为三种:第一,发生了自动驾驶系统指向的结果。此时,即便驾驶者采取了自救行为,但囿于干预时间过晚等原因,依然无法改变最小风险管理义务的行为指向。第二,实现了驾驶者所期待的结果。此时,尽管已据最小风险管理义务作出了判断,但驾驶者的自救行为足以扭转先前的行为。第三,造成了既非驾驶者期待,也非自动驾驶系统指向的结果。显然,当二者发生冲突时,有相当大的概率会导致双方都未达成自己的目标。例如,在二者发生冲突后,机动车撞向建筑,并同时波及公共安全,此时的结果均非双方最初的目的。
法律规范与基础理论的分析终究存在自身的局限性。对于以上结果的归责与调和路径,依旧沿着阶层论的场域,对客观归责中的因果关系和注意义务,依托一般性路径予以分析。然而当我们结合实际时,这一理论上的归责路径只能定位于“高屋建瓴”。申言之,以上二者只是较为上层的分析范式,对于解决具体问题欠缺现实意义。同时,在确定结果归责后,是否存在阻却或减轻责任的事由,依然需要结合具体的主客观因素加以分析。
(二)数据分析视角下的调和与归责路径初探
导致交通事故的因素复杂且多变。为使理论及规范的实施更加具有说服力,本部分力求周延地整理了当前影响交通事故的主要因素,并藉此分析自动驾驶系统及驾驶者在何种因素的影响下需要对造成的交通事故承担责任。
以影响交通事故的因素是否动态变化为标准,可将因素分为静态因素和动态因素。其中,静态因素包括:驾驶者本人因素,例如驾驶者年龄、性别等;交通设施因素,例如道路上的坑洞、凸起颠簸、道路的往常事故率、道路的几何设计(如倾斜路口、曲率、宽度不足的道路等)。动态因素则包括:天气因素,如雨雪天气、雾天等;光照因素,例如白天的光照、夜晚对向行驶车辆的远光灯以及道路本身的照明等;异常性因素,例如异常的道路参与者(突然窜入道路中的行人及非机动车)等。
需要说明的是,以上因素并非本文杜撰,而是经过对实践数据的归纳及模型分析所得出的结论。本文借鉴相关学者对100辆机动车测试的结果及分析的数据, 分析造成交通事故的因素,并制作图2:
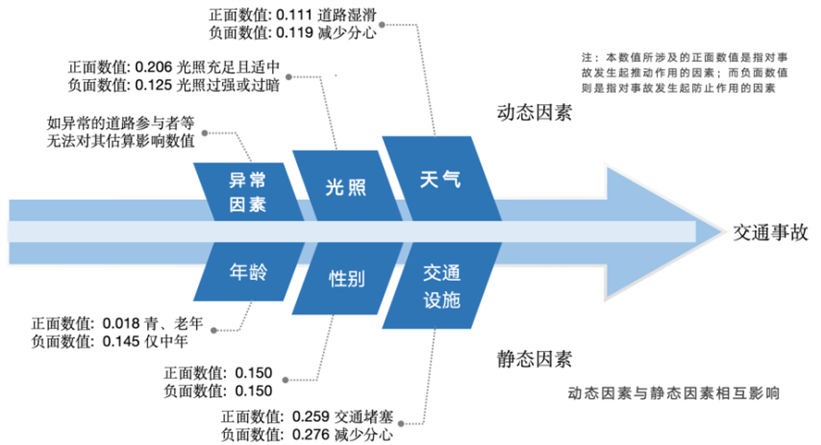
图2 影响交通事故的动态因素、静态因素数值
在图2中,动态因素主要代表与驾驶者相关的因素,其中光照、天气等因素会影响驾驶者在紧急情况下的反应时间;静态因素主要代表与自动驾驶系统相关的因素,如年龄、性别及交通设施等均需自动驾驶系统在设定系统之前加以考虑,以保证避免交通事故的效率。当然,动态因素并非完全与自动驾驶系统无关,静态因素也不是直接与驾驶者脱钩,而是两类因素具备自身的特征,而此特征分别与驾驶者与自动驾驶系统紧密关联。因此,本部分只能较为笼统地分析动态因素与静态因素的影响。同时,二者并非相互脱离,而是如同数据分析中的常量与变量相互影响。例如,当路况坑洼且偶遇降雨天气时,道路积水下隐患会影响机动车的走向。再如,当驾驶者注意力不集中且恰巧遇到道路曲率过大时,导致车辆脱离驾驶者的临时判断。因此,动态因素之间相互串联,也会极大提升发生事故的概率。
如图3,本部分通过不同象限中动态因素与静态因素对交通事故影响的绝对值及其交汇的点加以分析。其中,动态因素与静态因素交汇处的0点代表未受任何因素影响下的一般情形。在动态因素竖轴上,0点以上的数值表示对交通事故的推动作用,0点以下的数值表示对交通事故的防止作用。同理,在静态因素横轴上,0点右侧的数值表示对交通事故的推动作用,0点左侧的数值表示对交通事故的防止作用。
据此,本部分拟对上述影响因素进行数据分析,期望藉此明晰不同主体的责任。整体思路如下:倘若只有动态因素或静态因素其中之一发挥作用时,可以直接根据其影响数值判断,但假设二者相互影响时,受不同因素的叠加推动与互斥,会导致在多个维度的数值之间无法判断决定结果的因素。然而,本文的关注点并非明晰在交通事故中各因素的占比分别为多少,而是判断除去异常因素外,在哪些情形中,驾驶者与自动驾驶系统需要对事故结果承担责任。对于驾驶者而言,倘若在均为防止交通事故因素的场域下,反而造成事故,那么通过反向推导,便可能是驾驶者未履行注意义务。同理,自动驾驶系统倘若在动态因素和驾驶者自身因素并不造成正向加功时,对交通设施本身未尽到提醒和规避义务也可能成为结果归咎于自动驾驶系统的诱因。
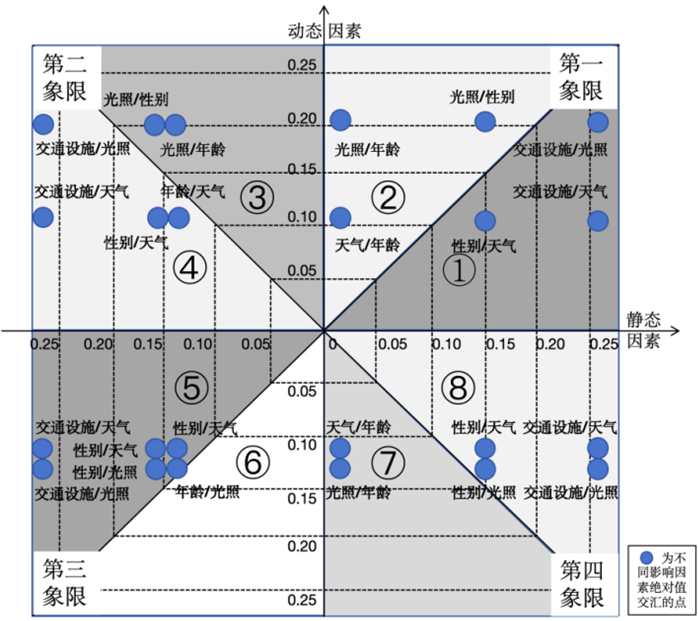
图3 影响交通事故因素数值分析
(三)调和路径之展开:分析与归责
本部分结合上述关于履行最小风险管理义务的行为和驾驶者自救行为的立场及调和路径的探讨,系统且详细地探讨上述情形的具体归责路径。
1.分析:厘清注意义务界定的难点
本部分中的注意义务是指,当存在推动或防止交通事故的情形时,驾驶者及自动驾驶系统对紧急情况的反应。动态因素与静态因素分别关涉不同主体的注意义务。
动态因素影响驾驶者的反应时间。换言之,以动态因素的影响值为0时作为基准,当处于对交通事故起推动作用的情形时,驾驶者的反应时间应相较一般情形下的反应时间较晚。驾驶者在此时间之前反应过来,并未违反注意义务。同理,当处于对交通事故起防止作用的情形时,驾驶者的反应时间本应较短。倘若此时驾驶者未在一般情形下的时间内及时反应过来,则违反了注意义务。
静态因素影响自动驾驶系统避免交通事故的效率。同样以静态因素的影响值为0时作为基准,当处于对交通事故起推动作用的情形时,自动驾驶系统避免事故的效率相应降低。倘若此时自动驾驶系统发挥正常的或相对较低的避免事故效率时,并未违反注意义务。当处于对交通事故起防止作用的情形时,自动驾驶系统避免事故的效率相应提高。此时倘若自动驾驶系统发挥较一般情形下较低或者等同的效率时,则违反了注意义务。
据此,当发生处于第一象限的情形时,均为推动交通事故的因素,对驾驶者及自动驾驶系统的注意义务要求最低。其中在区域2中,动态因素的影响相较于静态因素更高,驾驶者的注意义务要求最低;在区域1中,静态因素相较于动态因素的影响更高,自动驾驶系统的注意义务要求最低。当发生处于第二象限的情形时,动态因素起推动作用,静态因素起防止作用。此时驾驶者的注意义务相对较低,自动驾驶系统的注意义务相对较高。当发生处于第三象限的情形时,均为防止交通事故的因素,驾驶者及自动驾驶系统的注意义务要求最高。同时,影响因素均集中在区域5中,即静态因素的影响较动态因素更为显著,据此,驾驶者与自动驾驶系统的注意义务更高。当发生处于第四象限的情形时,动态因素起防止作用,静态因素起推动作用。此时驾驶者的注意义务相对较高,自动驾驶系统的注意义务相对较低。
2.归责:损害结果的责任归属
第一,对于仅造成驾驶者或最小风险管理义务所期待的结果。即便行为本身介入了其他因素,但事实上,由于介入因素本身并未对结果的发生产生实质性影响,而是依然按照先前行为的轨迹进一步发展。因此结果依然归责于驾驶者或自动驾驶系统单方。
其一,对于造成驾驶者期待的结果,此时探讨驾驶者是否对公共安全损害承担责任。情形一:倘若此时的因素均对事故发生起推动作用。驾驶者按照较一般情形下较长或相等的反应时间掌控机动车,此时并未违反注意义务。例1,当面对强光照射及路面积雪的情况下,驾驶者对于紧急情况的出现及时反应,但仍未阻止对公共安全造成损害结果的。此时驾驶者成立避险过当,但可适用期待可能性免除刑事责任。情形二:倘若此时的因素均对事故发生起防止作用,此时驾驶者的反应时间长于一般情形的,驾驶者违反了注意义务。例2,当光照有助于视野且无积雪的情况下,驾驶者面对紧急情况未能及时反应,最终造成公共安全损害的,驾驶者的行为虽然也可构成避险过当,但只得根据期待可能性适当减轻刑事责任。
其二,对于造成自动驾驶系统希望的结果,此时讨论自动驾驶系统的设计者及厂商是否对驾驶者的伤亡承担责任。情形一:倘若此时的因素均对事故发生起推动作用。若履行最小风险管理义务可以发挥较一般情形下较低或相同的防止事故效率,此时自动驾驶系统的设计者及厂商并未违反注意义务。例3,当路过曲率较大的路口时面临紧急情况,履行最小风险管理义务实现较在一般路口较低或相同的防止事故发生的效率。此时表明自动驾驶系统的设计者及厂商周全地考虑到了交通设施,可根据期待可能性免除其刑事责任。情形二:倘若此时的因素均对事故发生起防止作用。若履行最小风险管理义务只能发挥较一般情形下较低的防止事故效率,此时自动驾驶系统的设计者及厂商违反了注意义务。例4,在道路笔直且并无雷达侦测盲区的条件下面临紧急情况时,未能发挥正常情形下的防止事故效率。此时自动驾驶系统的设计者及厂商未完全地考虑交通设施,只得适用期待可能性适当减轻其刑事责任。
第二,对于造成双方均未期待的结果的情形。此时需根据上部分的象限图加以详细分析。
当发生处于第一象限的情境时,动态因素与静态因素均对事故发生起推动作用,此时无论对驾驶者还是自动驾驶系统的注意义务都较低,双方对最终的结果都存在不承担责任的可能性。同时,在区域1中,自动驾驶系统免责的可能性最高,在区域2中,驾驶者免责的可能性最高。同理,当发生处于第三象限的情境时,无论是驾驶者还是自动驾驶系统均不可能对损害结果免责。例5,当面临强光照射且路面积雪堆积时,在道路曲率较大的公路上面对紧急情况;例6,当照明充足且路面平整时,在笔直的公路上面对紧急情况。驾驶者与自动驾驶系统在以上两个例子中的反应明显是存在差别的。例6相较例5,更应适用期待可能性免除刑事责任。
而当发生处于第二象限的情境时,动态因素起推动作用,静态因素起防止作用,驾驶者免责的可能性较高,自动驾驶系统免责的可能性较低。同时,即使双方都承担刑事责任,在量刑方面,对驾驶者的量刑也应相应降低。同理,当发生处于第四象限的情境时,驾驶者免责的可能性较低,自动驾驶系统免责的可能性较高。同时,即使双方都承担刑事责任,在量刑方面,对自动驾驶系统设计者及厂商的量刑也应相应降低。例7,当面临强光照射且路面积雪堆积时,在笔直的公路上面对紧急情况;例8,当照明充足且路面平整时,在道路曲率较大的公路上面对紧急情况。在例7中,驾驶者相较于自动驾驶系统更有可能适用期待可能性免除刑事责任,而在例8中,则是自动驾驶系统相较于驾驶者更有可能适用期待可能性免除刑事责任。
余论
人机共驾模式下的“电车难题”作为当前技术发展下可以预见到的问题,对其展开讨论绝非无用功。同时,对于本文提及的突发情形等较难预测的变量,也不应成为立法的障碍。此外,今后还需吸纳与分析人机共驾模式下认定事故责任的证据。对于可能影响案件事实的车内录像、方向盘的手掌触感及力度的数据等证据,也需要在规范层面加以肯定,从而确保更加公正地认定案件事实。
因篇幅限制,已省略注释及参考文献。原文详见《河北法学》2025年第3期